Робот учится так браться за инструмент, чтобы можно было его использовать
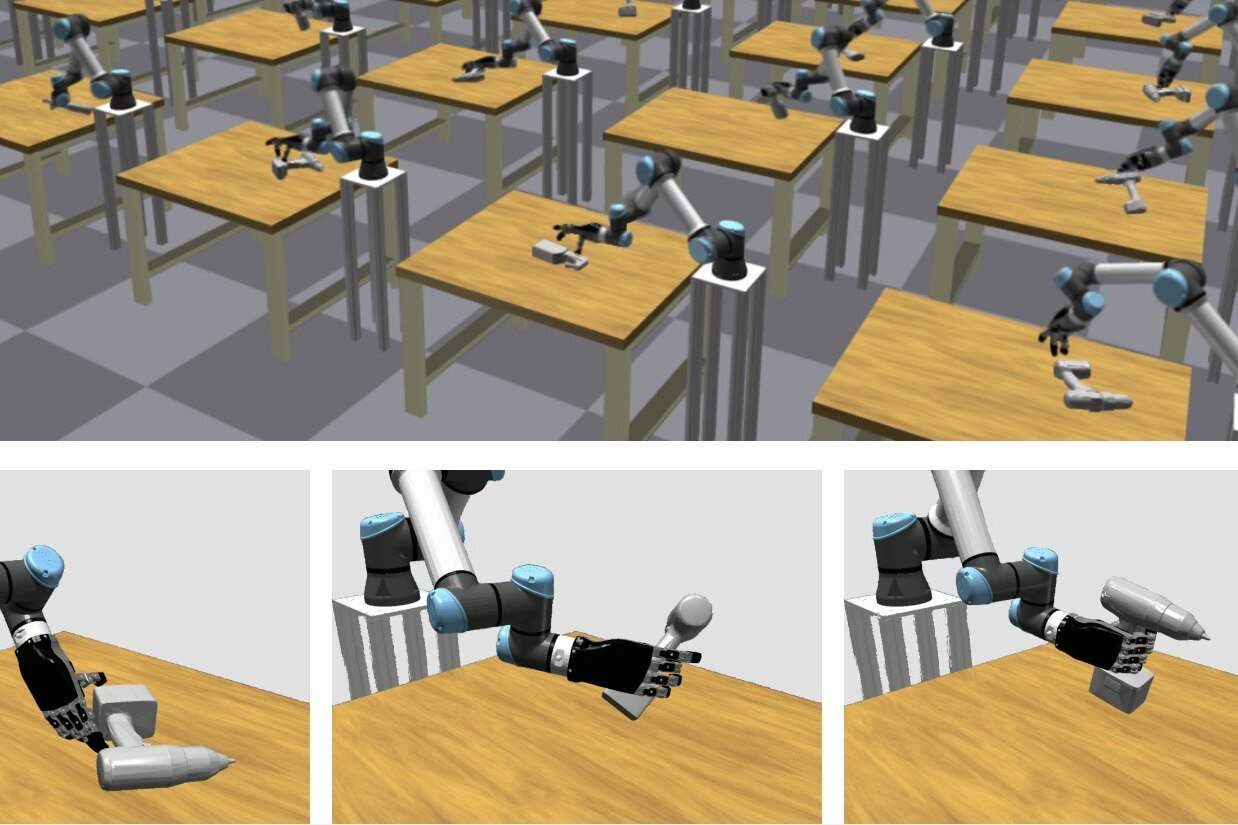
Исследовательская группа Autonomous Intelligent Systems (AIS) Боннского университета разработала новую технологию обучения, позволяющую улучшить способность роботизированной руки манипулировать объектами. Робот с антропоморфной "рукой" обучился в модели цифровой симуляции правильно поворачивать дрель, брать ее за ручку и нажимать кнопку.
Робот учится брать дрель за ручку и нажимать на кнопку. Это очень непростое дело. То, что человек это умеет «по умолчанию», только осложняет дело: тому, чему ты сам не учился, научить крайне непросто. Но на помощь пришло глубокое обучение.
Большинство взрослых людей обладают врожденной способностью брать предметы, находящиеся в окружающей среде, и удерживать их таким образом, чтобы правильно использовать. Например, когда человек берет в руку половник, он почему-то берет его именно за ручку.
Но роботов необходимо обучать тому, как следует брать и удерживать предметы. Это непростой процесс, поскольку робот постоянно имеет дело с объектами, с которыми он раньше не сталкивался.